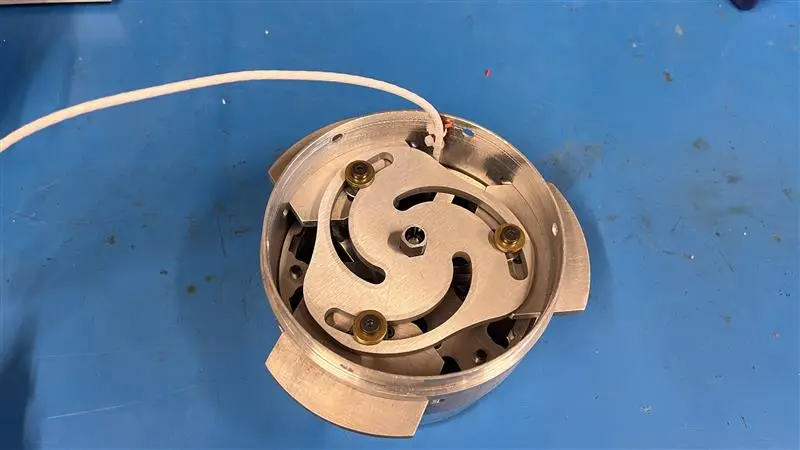
At Waterloo Rocketry, the airbrakes project was part of the broader effort to design active stability and trajectory control systems for the team’s competitive sounding rockets. The system relied on deployable aerodynamic surfaces—airbrakes integrated into the rocket’s body—that could extend into the airstream to modulate drag in real time.
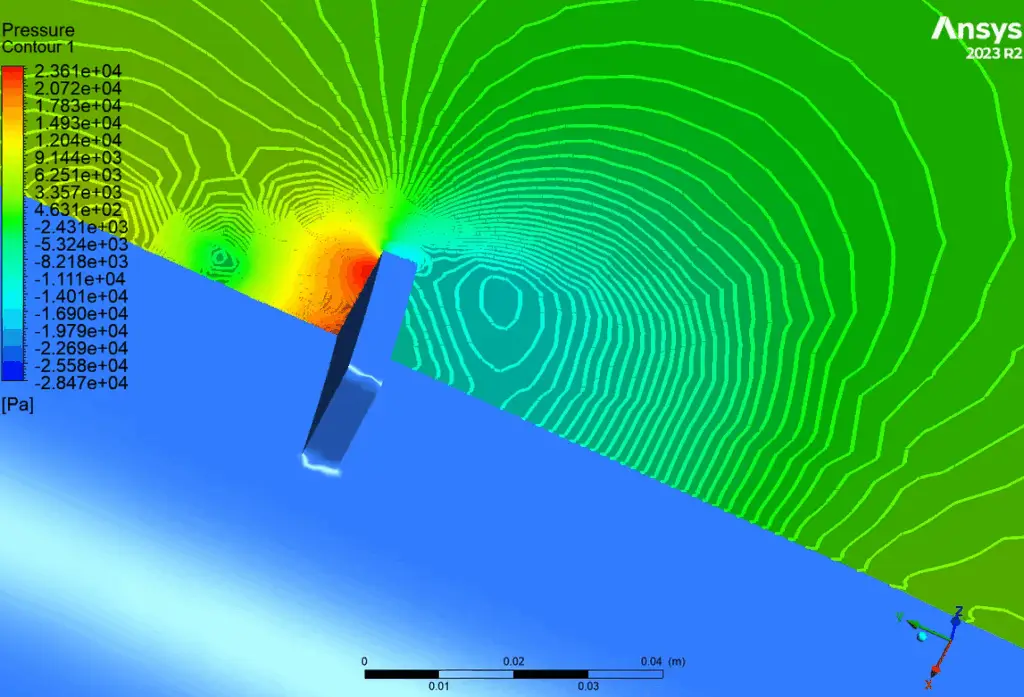
The control system was implemented on STM32 hardware running FreeRTOS, using sensor feedback and CAN communication for closed-loop actuation. Prototypes were built and tested to validate aerodynamic performance, ensuring the airbrakes could reliably reduce altitude overshoot and keep the rocket within competition limits.